强化学习系列(五):Policy Gradient
强化学习系列(五):Policy Gradient
Peter写在前面:前面所提到的Q-value Based方法无法解决连续动作空间场景下的优化问题,因为Q-learning的策略是从多个离散动作中贪婪地选择最大Q值,在连续空间中,无法枚举所有动作。为此,本节讲述一种直接面向策略的优化方法:Policy Gradient
1. Policy Gradient
训练目标: $ \pi_\theta(s,a)=P[a|s,\theta] $
Ques: 什么样的策略算是好的策略,如何进行梯度更新
Ans:think $ \theta $ 会影响策略 $ \pi $ , $ \pi $ 会影响episode采样路径 $ \tau={s_1,a_1,r_1,s_2,a_2,r_2,…,s_T,a_T,r_T} $ ,根据 $ \tau $ , 我们可以算出 $ R(\tau)=\sum_{n=1}^N r_n $ ,我们希望采样路径的 $ R(\tau) $ 尽可能的大method
用采样路径的平均收益来评价一个 $ \theta $ 的好坏
$ \bar R_\theta = \sum_{\tau} R(\tau) \cdot P(\tau|\theta) \approx \frac{1}{N} \sum_{n=1}^{N} R(\tau^n) $
推导 $ \bar R_\theta $ 的梯度:
$ $ \nabla \bar R_\theta=\sum_\tau R(\tau) \nabla P(\tau|\theta)=\sum_\tau R(\tau)P(\tau|\theta) \frac{\nabla P(\tau|\theta)}{P(\tau|\theta)}=
\sum_\tau R(\tau)P(\tau|\theta)\nabla logP(\tau|\theta) \approx \frac{1}{N}\sum_{n=1}^N R(\tau^n) \nabla log P(\tau^n|\theta) $ $
其中, $ P(\tau|\theta)=p(s_1)p(a_1|s_1,\theta)p(r_1,s_2|s_1,a_1)p(a_2|s_2,\theta)… $
由此,我们有: $ log P(\tau|\theta)=logp(s_1)+\sum_{t=1}^Tlogp(a_t|s_t,\theta)+logp(r_t,s_{t+1}|s_t,a_t) $
$ \nabla logP(\tau|\theta)=\sum_{t=1}^T\nabla logp(a_t|s_t, \theta) $
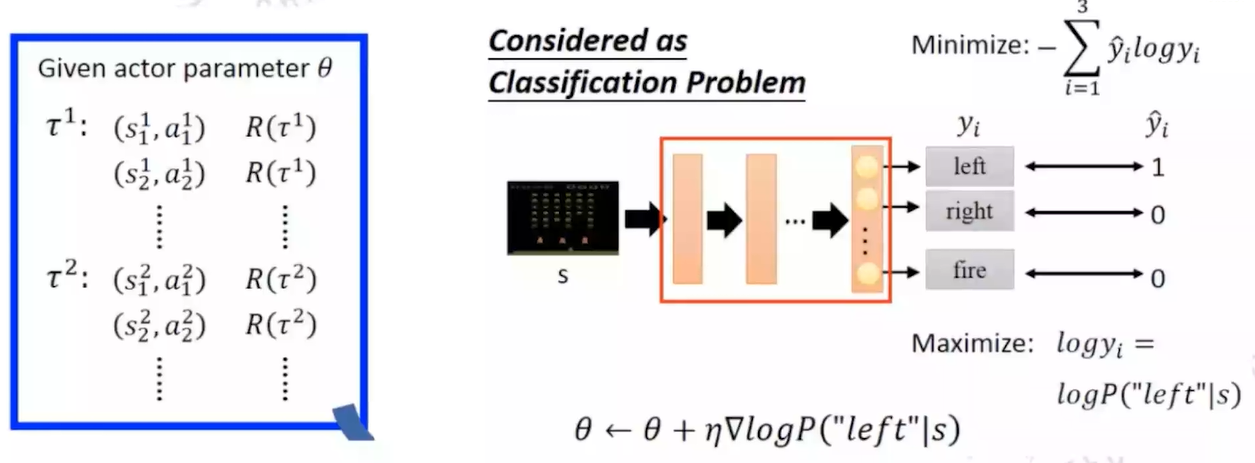
由此,我们可以将policy gradient视为一个分类任务对 $ \nabla \bar R_\theta $ 进行更新
类比分类任务:
2. Actor-Critic
在Policy Gradient方法中,我们在更新 $ \nabla \bar R_\theta $ 时,借助累计收益 $ R(\tau^n) $ 作为优势估计,然而在一些情况下,虽然 $ R(\tau^n) $ 是positive的,但是效益还比不过随机效益的话,其实也是不能接受的。因此,需要add a baseline去进一步评估positive or negtive,从而更好地指导 $ \nabla logP(\tau|\theta) $ 的更新
核心思想:
(1)Actor:学习策略 $ \pi_\theta(a|s) $ ,负责决策
(2)Critic:学习一个价值函数 $ V_w(s) $ ,估计状态的“好坏”,指导 Actor 改进策略
梯度更新:
$ $ \nabla \bar R_\theta \approx \frac{1}{N}\sum_{n=1}^{N}\sum_{t=1}^{T_n}(R_\tau^n-baseline) \nabla log P_\theta(a_t^n|s_t^n) $ $
其中 $ R_\tau^n $ 可以表示为 $ E[G_t^n]=Q^{\pi_\theta}(s_t^n,a_t^n) $ ,baseline表示为 $ V^{\pi_\theta}(s_t^n) $
Ques: 需要estimate Q和V两个网络吗
Ans: 可以只estimate value network
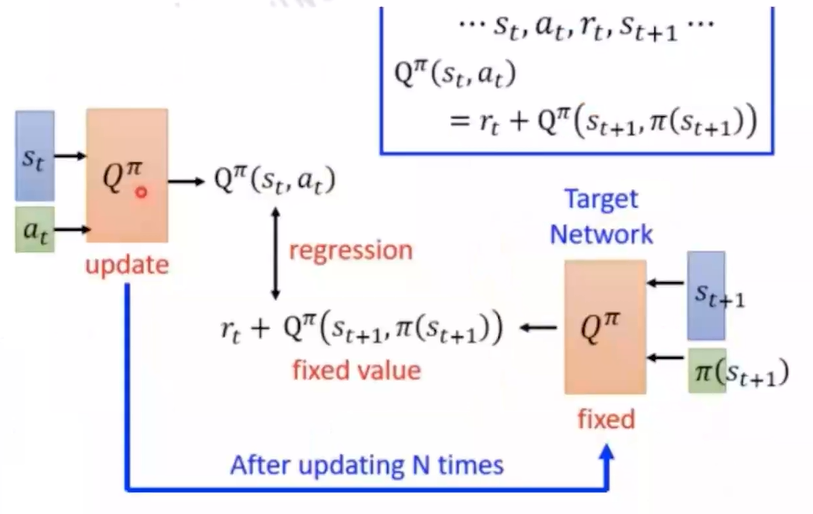
利用 $ Q^{\pi_\theta}(s_t^n,a_t^n)=E[r_t^n + V^{\pi_\theta}(s_{t+1}^n)] \approx r_t^n + V^{\pi_\theta}(s_{t+1}^n) $
我们可以得到Advantage Function: $ Q^{\pi_\theta}(s_t^n,a_t^n)-V^{\pi_\theta}(s_t^n)=r_t^n - (V^{\pi_\theta}(s_t^n)-V^{\pi_\theta}(s_{t+1}^n)) $
summary