RLHF(一):LLM post-training
RLHF(一):LLM post-training
Peter1. PPO算法
$ L_{PPO} = \sum_{(s_t,a_t)}\frac{\pi_\theta(a_t|s_t)}{\pi_{ref}(a_t|s_t)}A(s_t,a_t) - \beta KL(\pi_\theta, \pi_{ref}) $
PPO的训练步骤如下:
(1)收集人类反馈,人工标注数据 (2)训练奖励模型 (3)采用PPO强化学习,优化策略
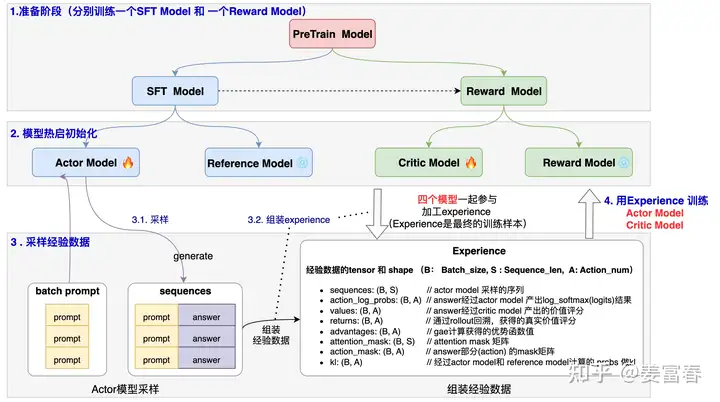
在LLM上使用PPO算法进行post-training时,主要涉及4个model:
- Actor Model: 是我们要优化学习的策略模型,同时用于做数据采样,用SFT Model热启
- Reference Model: 是为了控制Actor模型学习的分布与原始模型的分布相差不会太远的参考模型,通过loss中增加KL项,来达到这个效果。训练过程中该模型不更新
- Critic Model:是对每个状态做打分的价值模型,衡量当前token到生成结束的整体价值打分,一般可用Reward Model热启
- Reward Model:对整个生成的结果打分,是事先训练好的Reward Model。训练过程中该模型不更新
2. DPO算法
$ L_{DPO}(\pi_\theta; \pi_{ref}) = -E_{(x,y_w,y_l)\sim D}[log \sigma(\beta log\frac{\pi_\theta(y_w|x)}{\pi_{ref}(y_w|x)} - \beta log\frac{\pi_\theta(y_l|x)}{\pi_{ref}(y_l|x)})] $
DPO相比于PPO算法,由于它直接定义偏好损失作为策略来优化LLM,省去了奖励模型的定义,因此在post-training的流程上更为简练(PPO: SFT->RM->PPO)
如何理解DPO loss:
开始训练时,Reference model和Policy model都是同一个模型,在训练过程中Reference model不更新权重。我们将loss公式中的log部分展开,然后设 $ \beta $ 为1,并且暂时不看前面的log_sigmoid。从而将优化函数简化为: $ [logp(y_w) - logp_{ref}(y_w)]-[logp(y_l)-logp_{ref}(y_l)] $
训练的目标为将优化函数最大化。即我们希望公式的左半部分和右半部分的margin越大越好,左半部分的含义是good response相较于没训练之前的累计概率差值,右半部分代表bad response相较于没训练之前的累计概率差值
3. KTO算法
DPO算法中依赖的训练数据为:问题——期望回答——拒绝回答。高质量的偏好数据收集较为困难。KTO则回避了这个问题,可以直接利用二元信号标记的数据来训练算法,对于负样本更加敏感
前景价值函数:决策者根据实际收益或损失所产生的主观感受的价值。(决策时,相对于收益,决策者对损失更加敏感)
KTO算法的loss如下:
$ L_{KTO}(\pi_\theta; \pi_{ref}) = E_{(x,y)\sim D}[\lambda_y - v(x,y)] $
其中, $ z_0 = KL(\pi_\theta(y’|x)||\pi_{ref}(y’|x)) $ , $ r_\theta(x,y)=log \frac{\pi_\theta(y|x)}{\pi_{ref}(y|x)} $
4.GRPO算法
在PPO算法中,每个时间步都有一个价值网络去估计优势函数,这使得训练资源消耗巨大。为了减少在post-training的过程中对价值网络的依赖,GRPO采用“分组输出相互比较”的方式来估计基线,从而省去Critic Model。
关键点:分组采样与相对奖励
对于一个问题q,Actor Model会产生多份输出 $ o_1,o_2,…,o_G $ ,然后将这组输出一起送入奖励模型,得到奖励集合 $ r_1,r_2,…,r_G $ 。然后对奖励集合进行归一化 $ \tilde{r_i}=(r_i-mean(r))/std(r) $ ,从而得到分组内的相对水平,即相对奖励。GRPO会将相对奖励赋给该输出对应的所有token的优势函数。即 $ \hat{A}_{i,t} = \tilde{r_i} $ ,也就是说,输出 $ o_i $ 的所有token共享同一个分数,于是我们得到了一个无价值网络的优势函数。
综上所述,因为不再需要在每个token上拟合一个价值函数,GRPO可以大幅节省内存。
下面给出GRPO的loss function:
$ L_{GRPO}= E[\frac{1}{G}\sum_{i=1}^G \frac{1}{||o_i||}\sum_{t=1}^{||o_i||} min(\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{ref}(o_{i,t}|q,o_{i,<t})},clip(\frac{\pi_\theta(o_{i,t}|q,o_{i,<t})}{\pi_{ref}(o_{i,t}|q,o_{i,<t})},1-\epsilon,1+\epsilon)) \cdot \hat{A_{i,t}} -\beta KL(\pi_\theta, \pi_{ref})] $
Ques: 如何使用GRPO进行过程监督